ATTRIBUTES OF A RUBBLE DRIVEN COLLAPSE1
The first thing I want to look at is peak impulse in parallel collision of identical grains with a surface. If, instead of a rigid mass M, there were N particles summing to the same mass M colliding with a surface, how would the peak impulse delivered to the surface differ as the collisions varied from being simultaneous to being spaced out a bit?
This shows how peak force diminishes as a rigid body goes to a uniform random particle distribution about an average vertical separation distance, modeled with finite delta functions. This could be taken to be the peak force experienced by an impacted load bearing surface as the impactor goes from solid to particulate with increasing dispersal or relative compaction. The grains do not interact, they just impact the surface over an ever increasing time interval dictated by the average separation of peaks. An arbitrary reference velocity is chosen.
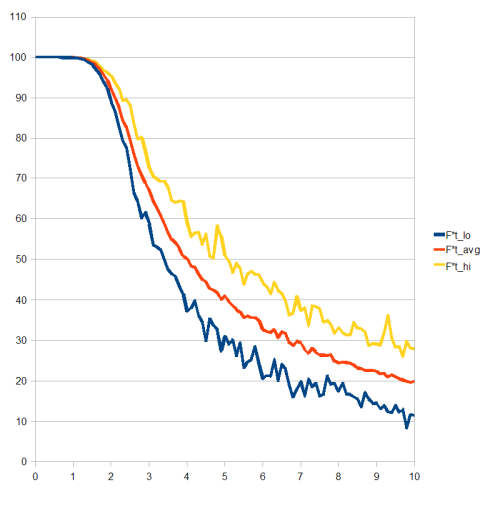
horizontal axis: average center separation in effective radius distance units
vertical axis: peak force; max=100
Peak force is important in considering whether a member will yield under impulse. For example, if a brittle surface yields under an applied force of 65 units in the graph, then an average interparticle separation of 3 units or more will not result in yield. The graph above is very, very trivial, expressing little beyond what basic intuition suggests. As soon as the hits become staggered to the order of the particle size, the peak force drops off. By the time the average separation is 10 radii the average of peak forces is 20% of that experienced by a single hit from one large mass.
The peculiarities of the model and the sampling combine to give this curve its shape, so don't take it as a general case. By using a simple bell shaped impulse for each collision, the location of the dropoff after critical separation is initially shallow, then very steep but becoming increasingly shallow again. Had a step function been used instead, the lines (except for the introduced randomness) would be straight. Not very interesting, neither very realistic. Debris oddsorts, excluding columns and braces of significant size, might well be expected to be compressible up to a point, and a simple sigmoid-type time derivative seemed appropriate for brief impulses from either elastic or inelastic collision.
I chose to use a uniform random distribution which averaged to the target separation rather than using all the same values. By executing a large number of trials, a set of maxima and minima over the distribution was obtained and are represented by the upper and lower lines, respectively. The middle (red) line shows the average of all trials or what might be the nominal case. The purpose was to get a practical spread on the peaks found in randomized grain densities of bounded size.
The limitations are severe, naturally. By parallel impact, I mean the particles do not stack up behind each other, each one impacts at its own point in time as an independent entity. Not a meaningful physical situation in itself, but think of it as a 1D abstraction in that this represents a differential horizontal layer of varying density. To go to 2D, in this case a vertical plane, the layers are extended vertically. The remaining horizontal dimension can be taken as translationally symmetric to the other up to the boundaries of the system.
This scheme of non-interacting particles will not be meaningful in a vertical integration. It does not count for accumulation of load on the surface, just change of momentum from the impact. As particles are allowed to accumulate, not only will static load increase but the effective static mass of the impacted surface will also increase, changing the momentum calculation when yield does occur.
The answer on the effects lies somewhere between a large rigid integral mass at some velocity and any sort of the same amount of mass at rest.
RigidBlock ----------------------------?-----------------------------------Granular Gas
At first only a ballistic solid mechanics simulation is considered. Grains interacting with each other and the environment, which will include an optional target which is at least initially an integral object. At this stage, any resemblance between a target and a floor assembly is intentional, but not to be taken to have strong correspondence. In most or all cases, the target will function simply as a load transducer and there will be no intention of modeling realistic floor (or perimeter) response.
I'm using the terms 'particle', 'granule' and 'grain' interchangeably.
Parameters and model choices for a simple ONE-GLOBAL-COLLISION model:
Dimensionality
1, 2 and 3D are all useful. 1D inelastic gases have immediate and direct utility. In cases of assumed spatial symmetry, 2D can substitute for 3D and make it all go quicker. Changes in fundamental results can be tracked as dimensionality increases.
Fixed Constraints
Presence or absence of immutable barriers (wall, ground) to confine the motion of the system. The geometry and placement of same.
Basic Environment
Gravity on/off, total size of any enclosure.
Number of Particles
1 to N. A single particle is the monolithic rigid block or a single local impactor. As N goes very large, the system tends towards powder. Allowing granule fracture means N can be variable.
Material Elasticity and Deformability
Particles would generally be near-rigid for expediency but not necessarily always so. Particle aggregates may be deformable. Elasticity of colliding bodies often determined by supplied restitution.
Particle Size Distribution
Uniform at one end of the scale, various random distributions at the other. This could span many orders of magnitude in real debris and poses a serious problem for any computation. Most solvers are susceptible to error when the differences between the least and greatest magnitudes of a parameter differ by many orders.
Particle Shape
The simplest of the shapes for each dimension are point, circle, sphere. Primitive shapes make for the simplest systems and quickest execution times, but the sky's the limit. Spheres, cubes, cylinders, and tetraheda are the most likely atomic elements.
Material Density
The mass per unit volume of the material composing granules. If more than one material, there will be as many density values of this type.
Particle Density Distribution
A uniform random distribution is the simple case. Various gradients according to initial compaction is an example of something more involved.
Particle Velocity Distribution
The group of granules will have a net momentum but individual particle momenta can initially range from uniform coherent to highly randomized.
Effective Density
This is the overall density of the granular collection in a given area. The area may be of arbitrary interest or the entire extent and mass of all granules.
Since first experiments need to be the simplest ones, there will be plenty of time while they're running to plan the next stage. Especially since this is not the only thread wanting for simulation.
1D is useful, but boring, and I've already taken 1D gases pretty far and most of that is not of general interest. There is no efficiency advantage to running 2D in a 3D program, but there are some 2D programs of merit for this problem. 2D only assumes a translational symmetry in one dimension so is quite appropriate for much of the discussion.
Granules can be uniform spheres in the beginning. Restitution, group velocity, effective density and number of particles will be explored for the sphere set. A few size distributions next using the most interesting parameter band of the previous. Then a bounding subset of the same for another shape.
All bodies will be effectively rigid since the computations run much quicker, unless a particular environment imposes little penalty for some crude distortion. Granule fracture will not likely be part of early work.
The target will initially be rigid with no fracture. Both fixed and free variations are very useful, as the dynamics are quite different. The hybrid of a breakaway target is best, but perhaps not as useful as is seems until some meaningful threshold of failure established. This would be based somewhat on actual impulse imparted to the target based on free tests. Obviously, the target must be at least partially fixed if gravity is on.
A rubble-driven collapse is a gravity driven collapse. While a few runs may be done without gravity in the beginning, the effects of cumulative static loading may as well be incorporated quickly.
There's the next few months of spare time, once very first few trials are designed. Since I've already got PhysX up and running, it makes sense to start with spheres hitting a plate in 3D until a second environment can be chosen and integrated.
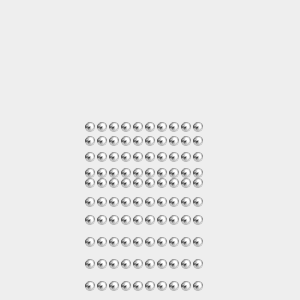
A crude precursor to a 2D collision simulator which will handle many thousands of disk elements.

Hopefully it speaks for itself. A drop of 100 identical disks arranged in a 10x10 grid with an average edge separation of 20% diameter in the x and y directions. The vertical separation is exactly 20%, whereas the horizontal separation is randomized by half that amount. The first frame shows the start position of the grid which then drops as a unit to the ground. The frames are not equally spaced in time but show interesting points from initial contact to scattering.
If the horizontal spacing is perfectly uniform, the rows bounce together and the ensemble behaves as ten 1D gas columns:
Here's a good basic introduction to collision dynamics as applied to granular problems.
ESysParticle, Yade, Code_Aster/Salome/Meca, LIGGGHTS, OpenFoam and a few others are all excellent programs for this task, but all Unix.
Dual boot system? Maybe. Fresh new particle simulation software based on best features of above? In work. Good commercial software out of the question.
At what point does this become unphysical?
I say the first time step. But it was fun.
Here's a side view of the bullet and coin.
Some may notice it's a mighty tough bullet. Yes, it is, by design.
Fracturing
Susceptibility from none to some arbitrary limit, both of granules and target.
Target Properties
Free or fixed. Density. Total mass. Rigid or flexible, and how much.
These aspects will be covered later, but it's useful to see the simplest case first.
Others might wonder what a bullet hitting a coin has to do with rubble, considering I just ripped 13 pages out of this thread. Well, it's about validating one of the candidate programs for exploring one aspect of the problem, which is ballistic collision with deformation and fracture.
In physics, collision problems are typically framed as elastic or inelastic, with some mention of restitution and a few momentum conservation problems where masses move away from the collision after KE loss. This puts a face on the latter. Eventually, with more close approximation of true fracture of brittle materials, studies can be done where the collision interactions are of the form body + body -> many bodies and many bodies + many bodies -> many more bodies.
It pays to start simple, though. The bullet is very resilient* because otherwise the elements at the tip fracture and, in this program, that means being deactivated and no further participation in the simulation. This is part of my complaint about the program. A bullet tip does not dissolve at 70 m/s and, even though it will vaporize somewhat at 700 m/s and maybe a lot at 7000 m/s, that's still not the same as disappearing. The true properties of lead, when plugged into this model, do not behave well for all velocities. Now I know something very useful about this program.
By testing simple systems, sanity checks are possible where it is not with more complex systems where the operator relies on the software to give a decent result as the real solutions are unknown.
* to be specific, I set it to a failure stress 100 times greater than that in the original example. Otherwise, it's lead!
More on sanity checks. The shading colors in the previous animations are based on X-Y plane stress values in the elements. Notice how the coin retains a final stress pattern after the bullet has passed through, almost locked in with very little change. This is a free body subjected to no external forces. All internal static forces must sum to zero, and I'm not sure that's true here.
The bullet has modes of oscillation, reflected in the time-varying stresses propagating through the body. Fine. The coin has been work-hardened, but only in theory and certainly not in this simulation. The coin shows high stress gradients with no significant symmetry. I can't at this point formally state what troubles me so, except that an elastoplastic mesh which is not exhibiting deformational oscillation modes should redistribute the stress to a new equilibrium. Does what's seen above make sense?
More of the same, bullet and coin. Pictures are so much nicer than words, but some explanation will be necessary.
These are like the others except for changes in initial orientation of the bullet. In the first one, the bullet is offset towards the edge of the coin, in the second it's rotated 30 degrees (same velocity vector though as the others).
Four large gifs showing simulation results (allow some time for all to load, apologies to users whose browsers load these when page loads):
Bullet - Offset from center (side view)
Bullet - Offset from center (back view)
Bullet - Rotated off trajectory axis (side view)
Bullet - Rotated off trajectory axis (back view)
In both cases, there is a net angular momentum in the system, unlike the previous case. In the discussions here about momentum conservation, there's been little or no mention of conserving angular momentum, but it's always there.
Consider general collisions in a crowd of debris: Different sizes and shapes of grains; a distribution of velocities, not necessarily random but somewhat randomized. Things come from every which way at each other. The idealized system of a perfectly aligned normal impact of one surface to another, collinear with center of mass, with uniform and highly symmetric bodies, represents a singular rare case not to be found in a debris field.
In these experiments, the introduction of asymmetry has profoundly changed the results of the collision, all other things being equal. Where the (nearly) direct center impact from before punched through the coin and imparted some linear momentum to it in the process, these later trials pierce but do not penetrate. The case of the 30 degree rotation is not a surprise since this change of geometry presents a greater cross sectional area of collision, but what of the first?
Let your eyes do the walking. From a simple physics standpoint, the system initially has only translational kinetic energy, no rotational, but does have an initial net angular momentum. The geometry of the collision dictates the applied impulse will produce a moment about the coin's center of mass. Whether or not the two bodies stick together, the coin will be spinning after the collision.
Translational KE gets partitioned into both translational and rotational KE, and quite a heap goes into rotational in a single collision. Besides the normal losses in collision to plastic deformation, fracture/pulverization and thermal dissipation, there is a rapid energy transfer to rotational degrees of freedom when integral bodies shatter and constituents subsequently recollide. For any arbitrary pair of shapes, there will be an scattering cross section associated with each possible orientation and, if plastic deformation included, a complex velocity dependency.
Rotational kinetic energy is not dissipated per se, since it is available to mechanical work. May I suggest that, while it remains available, it is less efficient at producing significant damage than translational KE and one step closer to being out the door into thermal waste. It is very nearly a hidden internal degree of freedom.
In future experiments involving the evolution from frictionless spheres to spheres with both static and dynamic friction properties, then to other shapes with simple moment interactions like these, it will be possible to see the diversion of translational into rotational energy and what effects it has on a debris stream.
Impact is a pretty cool program (if you stick to tweaking the examples)
On the positive side, I don't see as much to complain about as far as realism with these last runs, as judged by eye. In the off-center impact, back view from behind the coin, the perimeter of the coin can be seen drawing in towards the center until reaching a maximum deflection, followed by a muted elastic response. This is good, it indicates the handling of the elastoplastic response, with permanent well-distributed deformation yet some hysteresis, is at least qualitatively within expectation.
Taking Data; but how good?
Of course, trackers will be added to record dynamic quantities as simulations progress, but there will be limited time to do much in the way of validation except very simple systems. There will be no way, in general, to detect a subtle computational error unless it violates energy conservation. Therefore, it is best to approach all of the forthcoming simulations from a relative or comparative perspective, as well as a critical eye, both with respect to ones performed in the same environment as well as differing frameworks.
Virtual Whatevers
One has to think of these simulations as valid representations of something, so long as there are no obvious flaws, but applying whatever lessons learned will require care and discernment. The bullet and coin is an extremely simple system. From a theoretical standpoint, there is an infinite variety of results to be obtained from varying the available parameters, though probably the input maps continuously and fairly smoothly to results within the valid solution domain. From a practical standpoint, each framework has limitations on how accurately it can reproduce physical systems far from equilibrium, there may be only a limited band or no range at all where the simulation corresponds to reality, even with a bullet and coin.
Clock Time
It takes about 10 minutes to run each of these last series. Much more overhead pre and post. As the system scales in complexity, the time to compute increases drastically. As does setup and post processing, though not as much. So also does the chance of catastrophic blowup (singular matrix, program exception, etc) increase. It's not possible in the spare time of one person to fully evaluate the universe of discourse composed only of a bullet and a coin, and that's not even much like concrete, trusses, columns and office contents.
As notions become evident, they can be assimilated and guide future study towards fruitful results, primarily by exclusion of the uninteresting. It is an exercise in becoming an efficient cyborg, or the converse, if nothing else.
All properties of the simulation exactly the same as the rotated bullet above, except now the bullet is 'steel' instead of 'super lead'.
The visualization depicts total strain per element, and this time there's a front view instead of back view.
Side view
Front view
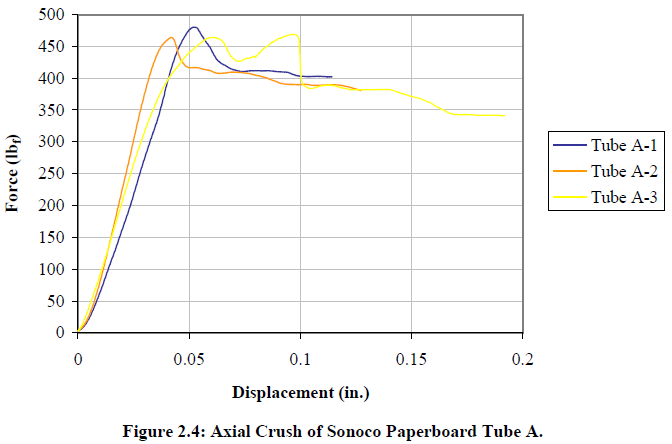
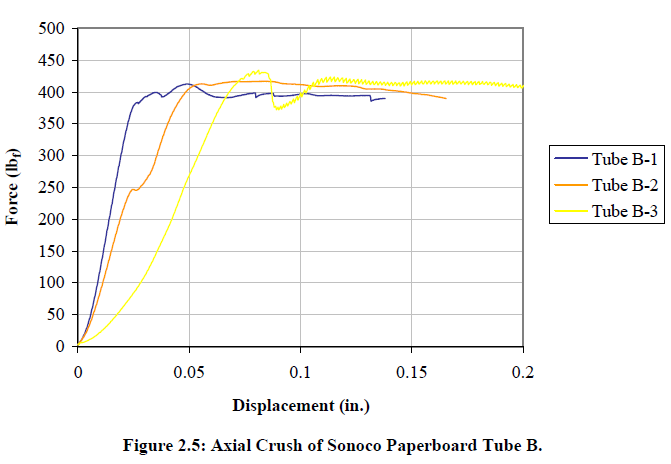
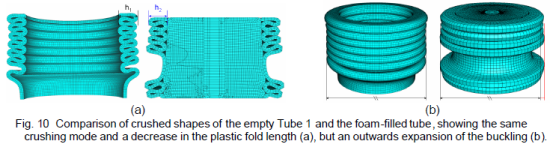
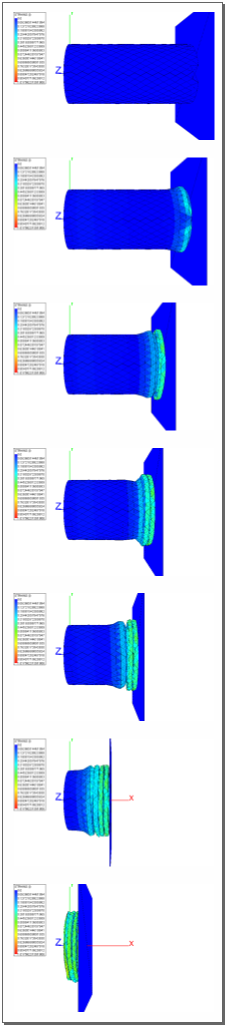
Here's an example of a means to obtain some correspondence between a particular simulator and a real (though very simple) physical system, besides comparison with analytical results for eigenvalues and momentum conservation: axial compression tests.
Consider cylinders. There is plenty of research in free literature covering [acronym=Analytical-Physical-Computational Experimentation]APCE[/acronym]* of axial load testing of cylinders of various material, solid/hollow, sizes and thicknesses. Some examples: